



Модуль ртутного датчика наклона KY-017 определяет положение наклона устройства. Принцип работы заключается в том, что чувствительный элемент содержит в себе небольшое количество проводящей жидкой ртути в стеклянном корпусе. При наклоне шарик ртути катится внутри корпуса и в зависимости от положения печатной платы устанавливает или разрывает соединение с электродами переключателя. В ситуации, когда конец стеклянной трубки в крайнем нижнем положении — контакты разомкнуты, а резистор 10 КОм подтягивает сигнальный вывод датчика к высокому уровню (5 В). В ситуации, когда конец трубки в крайнем верхнем положении, то ртуть замыкает контакты, а на выводе появляется низкий логический уровень (0 В) и загорается встроенный светодиод индикации.
На плате датчика имеется 3 контакта: GND, VCC, S. Первые два контакта нужны для подачи питания на модуль: поддерживаются уровни 3.3 и 5 вольт постоянного тока. Небольшие размеры печатной платы (19 x 16 мм) легко позволяют встроить датчик в компактный корпус. Модуль KY-017 будет полезен в проектах, где требуется фиксировать наклоны устройства и отдавать команды на включение двигателей или светодиодов.
Технические характеристики:
Ток потребления: до 0,3 мА
Напряжение питания: 3.3 / 5 В
Размеры: 6,4 x 7,4 x 5,1 мм
Распиновка модуля:
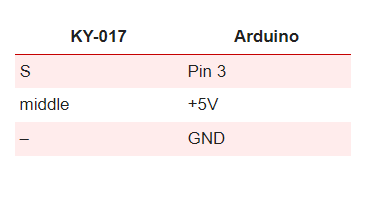
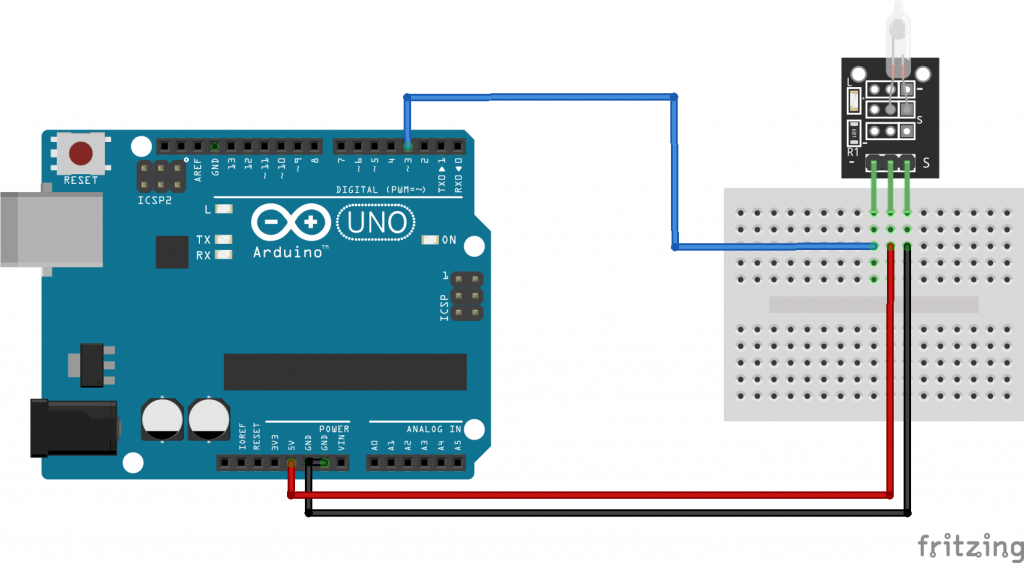
Схема подключения:
Программный код:
Встроенный светодиод L меняет свое состояние работы в зависимости от наклона датчика
int led_pin = 13; // Define the LED interface
int switch_pin = 3; // Definition of mercury tilt switch sensor interface
int val; // Defines a numeric variable
void setup()
{
pinMode(led_pin, OUTPUT);
pinMode(switch_pin, INPUT);
}
void loop()
{
val = digitalRead(switch_pin); // check mercury switch state
if(val == HIGH)
{
digitalWrite(led_pin, HIGH);
}
else
{
digitalWrite(led_pin, LOW);
}
}